| ГЛАВНАЯ |
| О ПРОЕКТЕ |
| ЗАДАЧИ ИССЛЕДОВАНИЙ |
| ТЕСТОВЫЕ РЕГИОНЫ |
| БАЗЫ ДАННЫХ |
| РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ |
| ОТЧЕТЫ |
| КОНТАКТЫ |



Описание алгоритма детектирования действующих пожаров
В основу процедуры детектирования действующих пожаров (hot spots) был положен модифицированный контекстный алгоритм, разработанный в Joint Research Center для формирования Global Fire Product.
На первом этапе проводится анализ космического изображения с целью отнесения его к одной из трех категорий: ночным, утренним/вечерним или дневным. Целью такой классификации изображений является адаптация алгоритма к температурным режимам пожаров в зависимости от времени суток, а также фильтрация "ложных тревог", вызываемых влиянием солнечного отражения. Отнесение изображения к одному из трех классов выполняется при анализе вспомогательного изображения, содержащего значения зенитных углов Солнца. Для каждого из указанных классов изображений применяется адаптированный к нему контекстный алгоритм.
В процедуру анализа дополнительно включен этап, позволяющий проанализировать результаты детектирования пожаров в заданной окрестности и повысить вероятность правильного распознавания.
Обработка ночных изображений
Характерной особенностью детектирования пожаров на изображениях этого класса является отсутствие "ложных тревог", вызываемых отражением солнечного излучения от воды (sunglint), верхних слоев атмосферы (top of atmosphere) и нагретых участков земной поверхности (desert area). Следует отметить существенное уменьшение интенсивности пожаров в ночное время и падение энергии излучения подстилающей поверхности, что приводит к сравнительно небольшим различиям радиояркостной температуры в 3-м, 4-м и 5-м каналах "пожарных" пикселов над фоновыми.
Пиксел помечается в качестве "потенциального пожара", если он удовлетворяет следующим условиям: T3 > 295K, T3-T4 > 4K и T4 > 265K. "Потенциальный пожар" признается реальным пожаром, если выполняются следующие условия:
- [T3 - T4] > T34f+1.5s34ф
- T3 > T3ф+2s3ф+3K
- T4 > T4ф+0.5K
Обработка утренних/вечерних изображений
На изображения этого класса уже оказывает влияние солнечное отражение, а пожары лишь незначительно увеличивают свою интенсивность по сравнению с ночным режимом горения. Поэтому пиксел помечается в качестве "потенциального пожара", если он удовлетворяет следующим условиям:
T3 > 298K, T3-T4 > 6K, T4 > 265K, R2 < 35%.
"Потенциальный пожар" признается пожаром при выполнении тех же условий, что и для ночных снимков.
Обработка дневных изображений
Большая вероятность "ложных тревог" приводит к необходимости введения различных пороговых правил для их фильтрации.
Пиксел помечается в качестве "потенциального пожара" при условиях T3 > 308K, T3 - T4 > 8K, T3 - T4 - 3*(T4 - T5) > 4K (маскирование открытых нагретых участков) и R1 - R2 >1% (маскирование отражения от воды).
"Потенциальный пожар" признается пожаром, если выполняются следующие условия:
- [T3 - T4] > T34ф+2s34ф
- T3 > T3ф+2.5s3ф+3K
- T4 > T4ф+1K
- R2 < 25% - маскирование отражения от облаков
- T3 > 321K,
- T3 > T3ф+2s3ф+3K,
- T3 - T4 > 5K,
- T4 > T4ф+1.5K,
- R2 < 15%.
R1 и R2 - альбедо в 1-ом и 2-ом каналах
T3, T4, и T5 - - радиояркостные температуры в 3-ем, 4-ом и 5-ом каналах
T4ф - средняя яркостная температура фона в 4-oм канале
T3ф - средняя яркостная температура фона в 3-ем канале
T34ф - среднее значение разности [T3 - T4] пикселей фона
s3ф - стандартное отклонение яркостной температуры фона в 3-ем канале
s34ф - стандартное отклонение значений разности [T3 - T4] пикселей фона
В настоящем разделе приведено описание общего алгоритма для детектирования пожаров по изображениям, полученным в разное время суток. В эксперименте были задействованы только дневные изображения спутника NOAA 14, накопленные в течение пожароопасного сезона 1998 года.
РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТА
Методика эксперимента
Эксперимент по детектированию пикселов изображения AVHRR/NOAA с действующими пожарами включал несколько этапов:
- Визуальный отбор изображений свободных от облаков
- Геореференцирование отобранных изображений с использованием параметров орбиты спутника
- Уточнение географического положения изображений по изображению водной маски Земли
- Детектирование горячих точек (hot spots), где вероятно действовал пожар
- Преобразование в картографические покрытия и погружение их в ГИС
Первые два этапа выполнялись с использованием программной оболочки, предназначенной для предварительной обработки телеметрической информации спутников NOAA. Она позволяет производить загрузку, просмотр телеметрических изображений AVHRR, геореференцирование их по элементам орбиты, радиометрическую коррекцию, и преобразование в необходимые для последующих этапов обработки форматы хранения данных.
На следующем этапе проводилось уточнение привязки изображений, геореференцированных по орбитальным параметрам спутника. Алгоритм привязки основан на анализе изображения водной маски DCW и участков воды, выделенных по AVHRR/NOAA. Адаптивные пороги позволяют достаточно точно маскировать такие участки. В качестве критерия для вычисления линейного сдвига используется максимум корреляции между двумя битовыми масками. Полученные значения величины сдвига вносились в виде поправок в географические координаты каждого изображения.
Далее осуществлялось детектирование горячих точек (hot spots) на изображениях AVHRR, и определение их географических координат. В результате обработки изображений формировались текстовые файлы с координатами выявленных горячих точек.
Завершающей стадией экспериментальной обработки являлось формирование картографических покрытий с необходимым набором атрибутивной информации о каждом участке действующего пожара. Для каждого выявленного участка действующего пожара определялись такие характеристики, как дата и время детектирования, номер витка спутника, площадь очага в гектарах и периметр в км2. Базовым форматом для хранения и последующего анализа результатов обработки выбраны картографические покрытия программной среды GIS ARCVIEW 3.0.
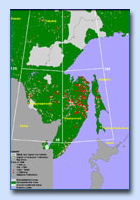
Рис.1
Схема расположения тестового региона на Дальнем Востоке для проведения исследований по детектированию пожаров

Рис.2
Распределения количества изображений AVHRR/NOAA месяцам, допущенных к обработке по детектированию горячих точек.

Рис.3
График расположения изображений NOAA-AVHRR по дням для каждого месяца в течение пожароопасного сезона

Рис.4
Пример детектирования "горячих точек" в течение следующего периода наблюдения (98.07.12 - 98.07.30)
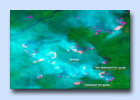
Рис.5
Примеры детектирования "горячих точек" под дымами
Для удобства обработки и сокращения размеров обрабатываемых изображений тестовый регион был разбит на четыре равные части (Рис 1). За отчетный период проекта была выполнена обработка изображений, покрывающих одну четвертую часть тестового региона. Полученные результаты детектирования пожаров позволили провести предварительный анализ и сделать некоторые выводы.
Из всего набора спутниковых данных AVHRR/NOAA (171 изображение) после визуального отбора по критерию облачности к предварительной обработке были допущены 82 изображения. Процент облачного покрова на отобранных изображениях не превышал 20%. На рисунке 2 приведено распределение количества изображений по месяцам вегетационного периода. Наибольшее количество изображений, свободных от облаков и доступных для обработки, приходится на конец мая и летние месяцы года. Распределение изображений по дням для каждого месяца отображено на рисунке 3.
По результатам обработки 82 изображений было выявлено 4278 участков возгорания лесных территорий, из которых на Сахалинскую область приходится 424, часть Хабаровского края - 3735 и часть Приморского края - 19. Общая площадь очагов горения составила около 1671 тыс. га.
Визуальный анализ результатов детектирования позволил выявить ряд особенностей разработанного подхода и внести коррективы в методику эксперимента. Во-первых, отбракованные изображения создали временные разрывы в наблюдениях за действующими пожарами, ограничивая тем самым возможности непрерывного мониторинга за их развитием и определения фактически пройденной огнем площади. Это актуально для крупных лесных пожаров, действовавших длительное время под облаками. На изображениях визуально обнаруживаются пожарища, площадь которых значительно превышает суммарную площадь горячих точек (рисунок 4).
Во-вторых, при одновременном действии большого количества крупных лесных пожаров, наблюдается сильная задымленность территории. Это приводит к изменениям в значениях альбедо и радиояркостных температур горячих точек, которые на изображениях визуально распознаются как открытый огонь (Рисунок 5). Однако эти пикселы не детектируются как горячие точки (hot spots), так как их значения не удовлетворяют пороговым условиям алгоритма.
Таким образом, за отчетный период работ получены следующие результаты:
- Разработаны программы обработки изображений AVHRR/NOAA для детектирования пикселов с действующими пожарами;
- Проведена подготовка базы данных о лесных пожарах, собранных службами авиационной и наземной охраны лесов на тестовый регион за 1998 год для последующей верификации результатов обработки;
- Выполнена обработка архивных данных AVHRR/NOAA за 1998 год на часть тестового региона и получены первые результаты, позволяющие сделать некоторые предварительные выводы.
- Отбраковка изображений создает временные разрывы в наблюдениях за действующими пожарами, ограничивая тем самым возможности непрерывного мониторинга за их развитием и определения фактически пройденной огнем площади.
- Для корректной оценки площадей действующих лесных пожаров кроме отдетектированных "горячих точек" необходимо учитывать пройденные огнем участки внутри их контуров. Выделение последних может осуществляться в результате анализа значений альбедо в первом и втором каналах изображений в ближайшей окрестности "горячих точек".
- Для детектирования пожаров в условиях сильной задымленности территории необходима модификация существующего алгоритма обработки изображения для выявления нагретых участков, закрытых дымом.